As robot industry soars, the world has observed a tense competition driven by demand for fundamental technologies. Recently a flexible robot hand developed independently by the University of Science and Technology of China (USTC) received an award of “Best in Manipulation” in RoboCup 2017, for its capability to grab objects in various shapes, sizes, and materials.

Certificate of Award “Best in Manipulation”
The conventional rigid robots, which are based on joint-rod structure, have been applied to traditional manufacturing in a large scale since the 60s last century. However, this rigid design is born with theoretical limitations. Its incomplete abilities to manipulate rigid objects of certain shapes besides prohibitive price, difficulty to operate and requirements for environments have posed obstacles on the development of robot industry. And the above incapability makes conventional robots fail to meet the tremendous need of new industries, such as intelligent manufacturing, logistics, housekeeping, agriculture, salvage, national defense and security.
The flexible robot hand developed by USTC is of a mingled design philosophy, which is to unify two structures – rigidness and flexibility – and two driven methods – electricity and pneumatics. Breaking the limitations of rigid robot hand and provides, this innovation not only promotes remarkably the adherence between the robot hand and the surface of manipulated object, but also lowers the requirement for accuracy in shape analyses of objects, and betters significantly the accessibility to the operating environment. In comparison with existing rigid, flexible, or software robot hand, the USTC robot hand is of stronger adaptability to different environments and capability to manipulate objects in more kinds of shapes, sizes and superficial characteristics, which enables vast application futurities.
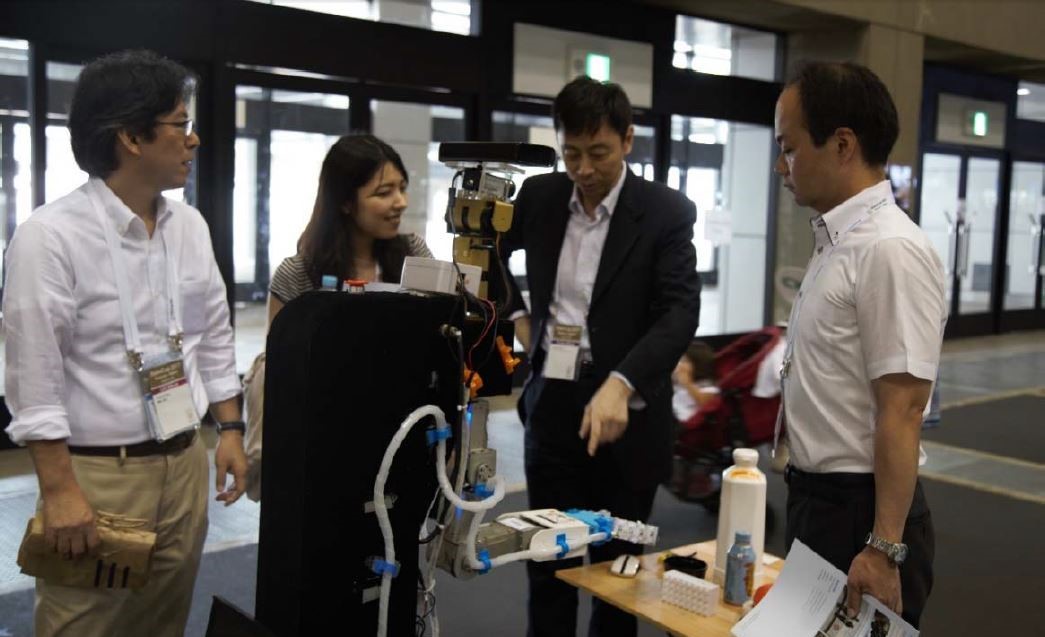
Officials and Experts Jointly Watch the Performance
RoboCup 2017 was held in Nagoya, Japan during July 24thto 30th. The USTC robot hand received exclusive award for “Best in Manipulation” in the most innovative part of RoboCup@Home League – Open Challenge. Team led by CHEN Xiaoping in USTC has been researching on software robots since 2011. An air-operated flexible robot arm independently invented by CHEN’s team with beehive net structure topped in 13th International Conference on Robotics and Biomimetics. The flexible hand displayed this time not only expands directions in this field further, but also greatly enhances the practical potential of the achievement, and establishes primarily a relatively complete system of independent researching, which provides sound fundamentals for further study and industrial application.

Professor Peter Stone and Professor Luca Iocchi Watch the Performance
Professor Manuela Veloso (former chairman of International Association of Artificial Intelligence, IEEE/AAAI/AAAS Fellow, and dean of Department of Machine Learning of CMU), Professor Peter Stone from University of Texas (winner of Computers and Thought Award, AAAI Fellow), Professor Luca Iocchi from Sapienza University of Rome (chairman of RoboCup@Home), officials including director of Robotics Policy Office of METI and experts jointly watched the performance of USTC flexible hand and praised highly on this robot hand. Professor Peter Stone immediately expressed his willingness to have USTC flexible hand applied to robots in University of Texas as soon as possible.

Professor Manuela Veloso Watch the Performance
Led by worldwide first-class laboratories like Harvard University, research in software robots has become tactical high ground of competitions in robotic source technologies. Besides USTC, other universities in China also have embarked on researching in key technologies and achieved important break-throughs, such as Harbin Institute of Technology, Beihang University, Shanghai Jiao Tong University, Zhejiang University, Beijing University of Chemical Technology, Tongji University, etc. Relevant projects have been started by National Natural Science Foundation of China.
This project is supported by National Natural Science Foundation of China.
(HU Dongyin, USTC News Center, School of Computer Science and Technology)