
screenshot of Terminator 2
In the movie Terminator, “T-1000”, the villain liquid-metal robot, is very impressive because its powerful weapon and Liquefiable metal body. While“T-1000”comes from the future in the movie, liquid-metal (LM) robots is coming into reality. Recently, researchers in Bio-inspired robot laboratory at the University of Science and Technology of China (USTC) designed a novel wheeled robot driven by a liquid-metal droplet. This work was published on the latest edition of Advanced Materials, a weekly peer-reviewed scientific journal covering materials science.
The controlled actuation of gallium LM alloys has presented new and exciting opportunities for constructing mobile robots with structural flexibility. However, the design of current LM-based actuators is often influenced by external environment, which limits their application outside a liquid environment.
In this work from Bio-inspired robot laboratory, a wheeled robot using a LM droplet as the core of the driving system is developed that enables it to move outside liquid environment. The LM droplet inside the robot is actuated using a voltage to alter the robot’s center of gravity, which in turn generates a rolling torque and induces continuous locomotion at a steady speed. The researchers developed a dynamic model using the Lagrange method to understand the locomotion of it. with special modification, they finally demonstrated a self-powered and fully untethered wheeled robot system with a mini-cylindrical lithium battery as the power source, and found that the robot can roll successfully on a flat surface at an angular velocity. This study is envisaged to have the potential to expand current research on LM-based actuators to realize future complex robotic systems.
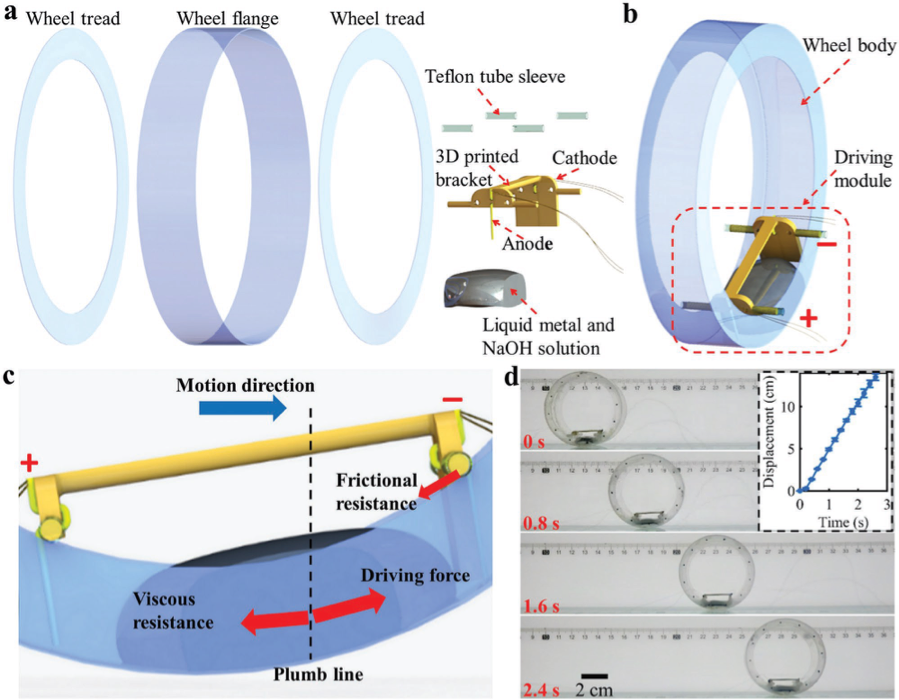
Working mechanism of the wheeled robot
The first author of the paper is WU Jian, a master student in the Department of Precision Machinery and Precision Instruments of USTC. Associate Professor ZHANG Shiwu from the Department of Precision Machinery and Precision Instruments of USTC, Dr. TANG Shiyang from the University of Wollongong, Australia, and Associate Professor LI Xiangpeng from the Center for Robotics and Microsystems of Suzhou University are all corresponding authors. The study also involves researchers FANG Tao at USTC and prof. LI Weihua at the University of Wollongong, Australia. The project was funded by the National Natural Science Foundation of China.
Full article:https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.201805039
(Written by YU Haikuo, edited by YE Zhenzhen, USTC News Center)