Skillful robots are always the pursuit of robotics research. Inspired by nature, researchers have designed soft-bodied robotic arms which can easily perform tasks, like surgery, that rigid robots require complicated computation. Yet performing interactions such as opening doors in daily life for robots remains challenging, due to the complexity and variety of real environments.
Illuminated by the way human interact with daily objects, team led by Professor CHEN Xiaoping of the University of Science and Technology of China (USTC) proposed a hierarchical control system and demonstrated how it helps an elephant-trunk-shaped soft robotic arm to perform daily interactions in unstructured environments.

The soft-bodied robotic arm of Honeycomb Pneumatic Networks structure opening a drawer. (Image by JIANG Hao)
To perform simple behaviors like opening doors and pulling drawers, a human only needs to move the hand backward after grasping the handle without accurately calculation, because of the passive compliance of the arm.
The proposed hierarchical control system imitates this intuition. The system utilizes the inherent compliance of soft-bodied robotic arms and choose the proper behavior according to the specific task, rendering precise environment models and force sensors unnecessary.
Then, high-level controllers set arm position goals for low-level ones based on selected behavior. Low-level controllers control the arm tip to achieve set goals.
Moreover, the arm is highly reliable owing to the low-level motion controllers based on Jacobian model and Q-learning. Even human interferences cannot affect its operation.
Through generating virtual goals, the Q-learning controller updates the model rapidly (up to 100 times) online, which enhance the ability of soft arms to deal with both internal uncertainties and external changes.
Early in 2013, the team has proposed a structure called Honeycomb Pneumatic Networks (HPN) and in 2016 fabricated an HPN soft robotic arm which achieved both flexibility and higher load capacity like an elephant’s trunk. The effectiveness of the system is demonstrated HPN arms.
Full results were published on the International Journal of Robotics Research, the top academic journal in the robot field.
This work is the first attempt to use soft arms to deal with the interaction tasks in unstructured environments. Thanks to inherent compliance and continuous deformation features of the arms, it holds great research value and presents application prospects in such fields as intelligent manufacturing, rehabilitation medicine, and home services.
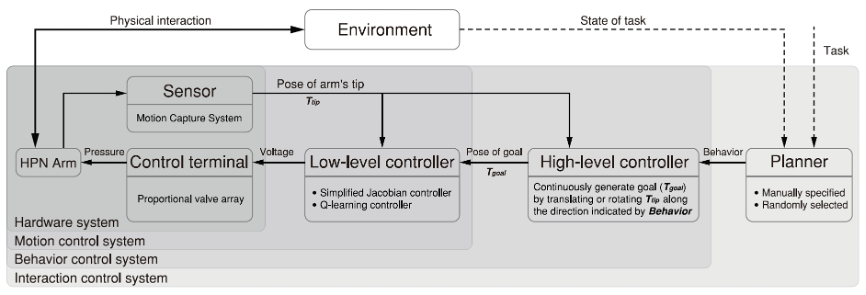
The hierarchical structure of the control system. Top-level planner selects the specific behavior for lower-level controller to achieve. (Image by JIANG Hao)
(Written by CAI Bohan, USTC News Center)