Prof. ZHANG Shiwu, Assoc. Prof. JIN Hu and Dist. Prof. WANG Liu from the University of Science and Technology of China (USTC) of the Chinese Academy of Sciences (CAS) proposed a soft-packaged and portable rehabilitation glove with fine movement training. It is expected to serve the fine motor rehabilitation and daily living assistance of tens of millions of patients with hand dysfunction around the world. The results were published online on October 5 in Nature Machine Intelligence.
The global population of patients with hand dysfunction is increasing, and nearly 10 million people are added every year due to stroke alone. Patients with hand dysfunction can recover hand function through repeated and continuous hand movement training. Soft-packaged rehabilitation gloves have the advantages of lightweight body and flexible movement, which can break through the disadvantages of traditional rigid gloves with low safety redundancy. However, because the flexible body is prone to large deformation, which is not conducive to motion perception, and gloves are not conducive to portability, most of the existing soft-packaged rehabilitation gloves can only achieve rehabilitation movement based on open loop control, which makes the precise rehabilitation of fine motor skills of the hand still very challenging.
In response to the above challenges, the researchers combined the bionic principle of finger skin fold structure and Hall sensing mechanism, and innovatively designed a bionic finger sleeve structure that integrates smooth movement and accurate perception, and proposed an integrated design method for multi-system soft-packaged rehabilitation gloves. Owing to the shape memory alloy (SMA) with high work-to-weight ratio and integrated design, the flexible rehabilitation glove robot weighs only 490 grams and has the ability to work independently. By imitating the folded skin of the back of the finger, the research team proposed a bionic design method of non-uniform stiffness flexible finger sleeve, which reduces the interference of finger sleeve movement on the sensing system and achieves stable and accurate finger state perception.
Further, the research team proposed a multi-modal fine action rehabilitation training method to achieve portable, accurate and safe rehabilitation training for patients with hand dysfunction. Clinical trials have preliminarily verified the advantages of the portable, low-cost soft-packaged rehabilitation glove robot in fine sports rehabilitation and life assistance.
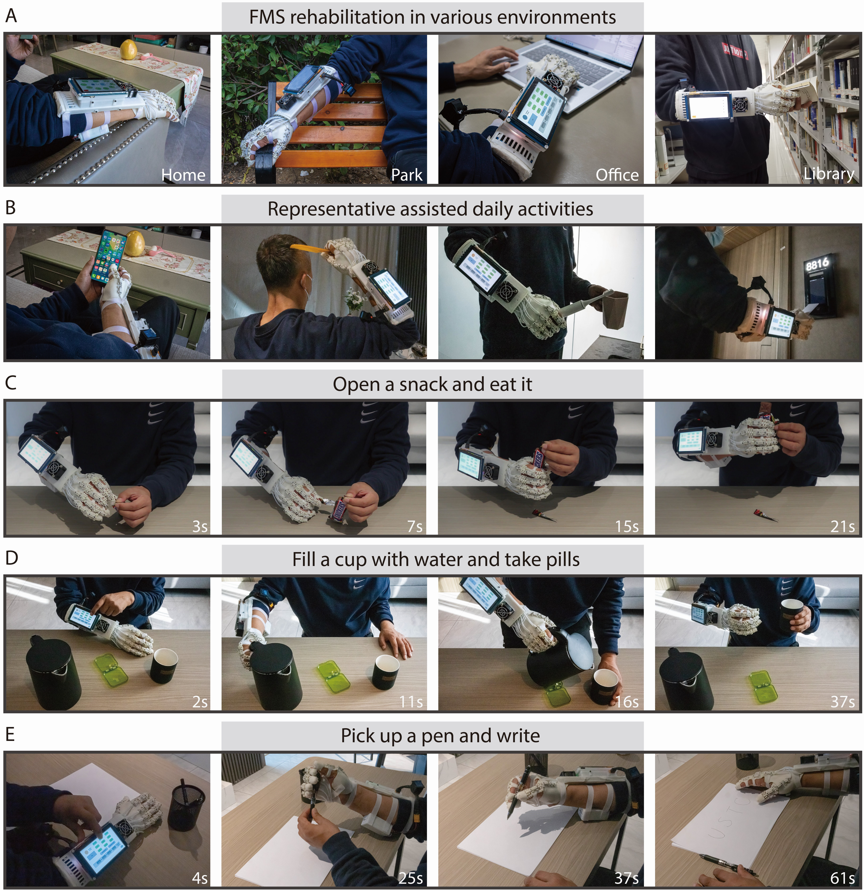
Multi-scene application and life assistance function of flexible rehabilitation glove robot
The lightweight and highly integrated design of the soft-packaged rehabilitation glove robot makes it extremely portable, so that the patient's rehabilitation training is separated from fixed rehabilitation places such as hospitals, and rehabilitation training in daily life scenes is realized. Because SMA drives do not produce noise like fluid drives, motor drives, etc., researchers have also verified its feasibility in low-noise environments. In addition, clinical experiments show that by combining the rehabilitation training of patients with the needs of daily life, the robot can realize the integration of fine movement skills rehabilitation and assisting patients' life, and greatly expand the application scenarios of soft-packaged rehabilitation glove robots.
Paper link:https://www.nature.com/articles/s42256-023-00728-z
(Written by CHEN Yehong, Edited by MA Xuange, USTC News Center)